研究詳細
RESEARCH

Research and Industry-Academia Collaboration
研究・産学連携
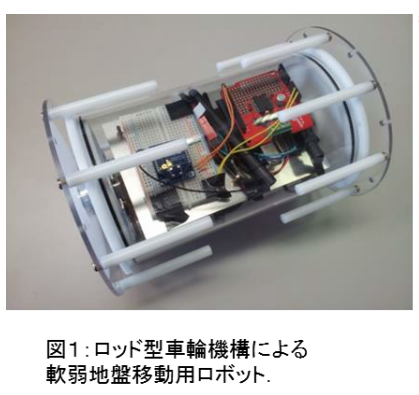
軟弱地盤用移動ロボット
概要
〇技術の背景
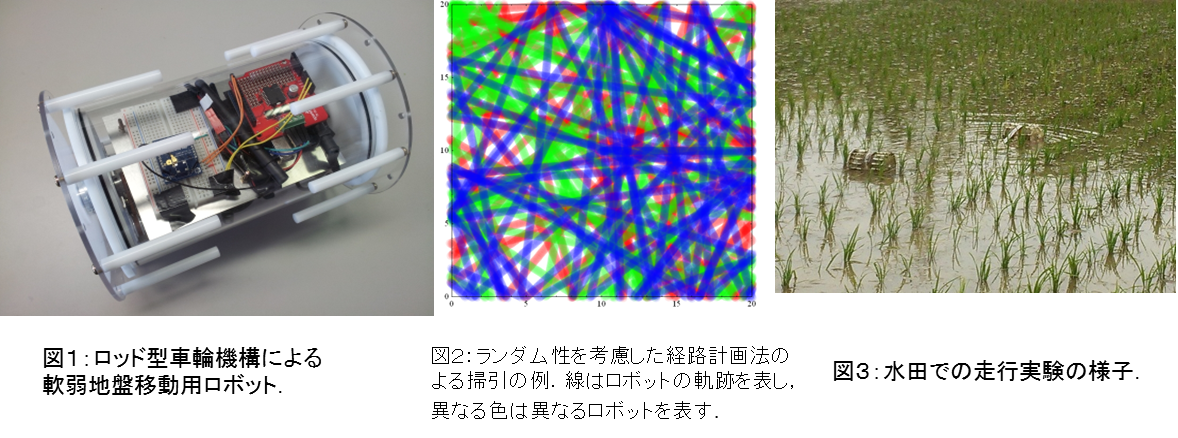
水田に代表されるように、水を含んだ土はとても柔らかく、車輪の回転によって土壌が変形し、簡単にスリップしてしまう。これを軟弱地盤と呼ぶ。
農業への応用を考えると、土壌を破壊せずに移動する機構が望まれる。
〇技術の概要
そのために、車輪の接地面積を減らすことにより車輪が土壌にあたえる力を低減させ、土壌の破壊を防ぎながら軟弱地盤での移動を可能にするロッド型車輪機構を開発した。
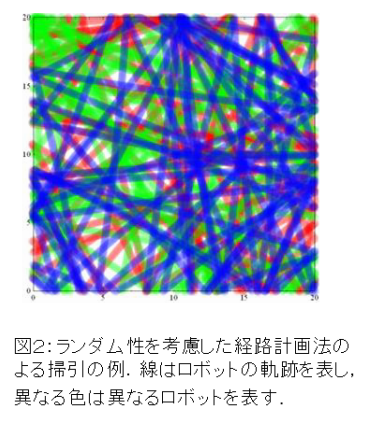
一方、土壌は各地点で傾斜や軟弱度が異なるため、直進のような正確な移動は困難である。しかし作業のためには、与えられた区間を隅々まで移動(=掃引)しなければならない。
そのために移動のランダム性を考慮したロボットの経路計画方法を開発した。
〇技術の応用性
干潟や砂地、月面も軟弱地盤であるため、多くの屋外作業ロボットへの応用が期待される。