研究詳細
RESEARCH

Research and Industry-Academia Collaboration
研究・産学連携
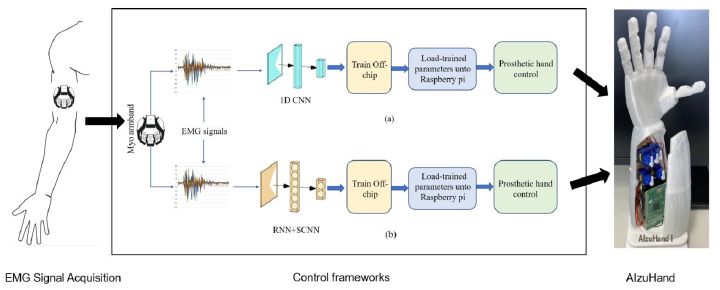
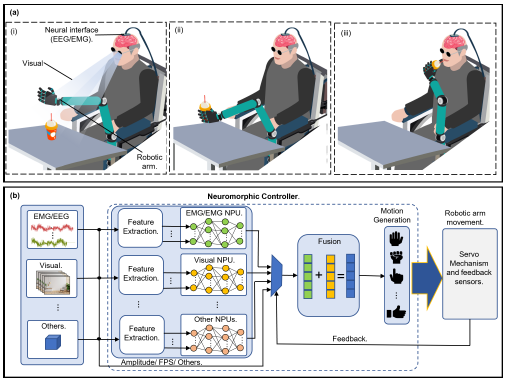
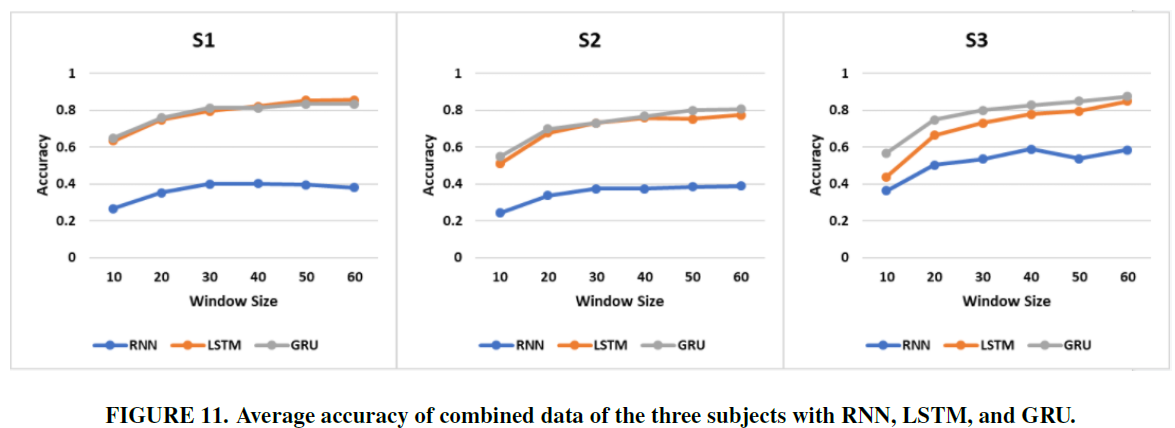
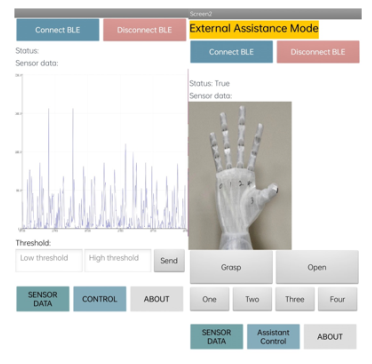
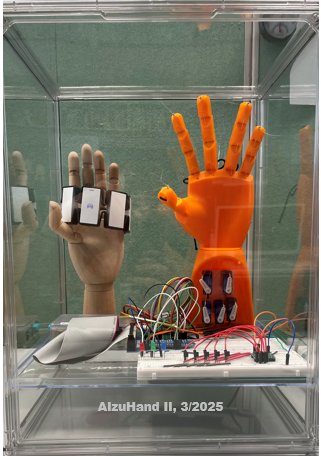
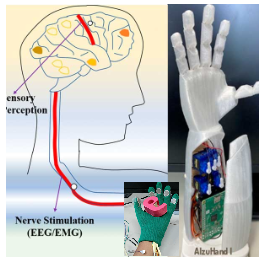
AIzuHand: 適応型リアルタイム非侵襲的ニューロモルフィック神経人工手
概要
切断や神経障害のある人々の握力と動きを回復することは、自立を取り戻すために不可欠です。 治療法として広く普及しつつある義肢は、切断や神経障害のある人々の握力を大幅に回復させ、生活の質を向上させることができます。 ただし、さまざまな感覚入力を組み合わせて複雑なタスクを正確に実行する生体エージェントとは異なり、ほとんどのプロテーゼは単感覚入力を使用し、自由度が限られており、長い患者訓練が必要です。
私たちは、切断や神経障害を持つ人々の把握力と感覚を回復するための適応義肢を研究しています。 特に、残存した腕や脚と環境を直接接続する非侵襲的技術を開発します。