研究詳細
RESEARCH

Research and Industry-Academia Collaboration
研究・産学連携
3D スパイキング ニューロモーフィック プロセッサ
概要
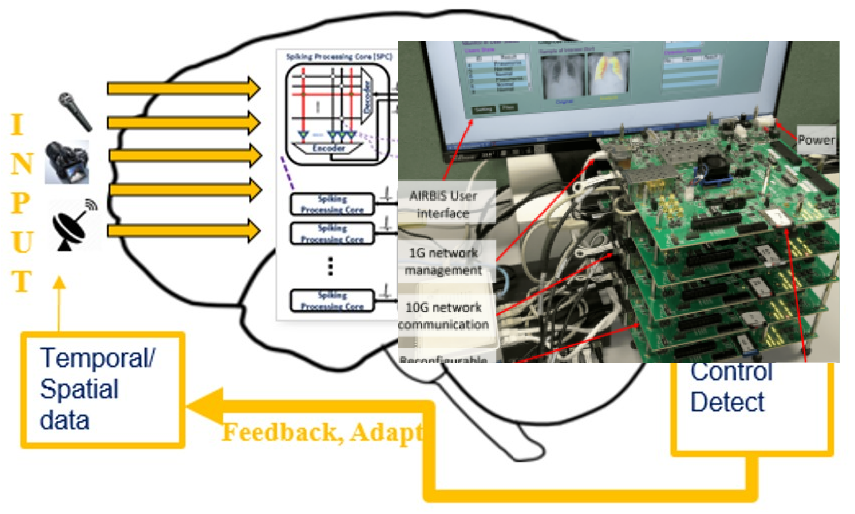
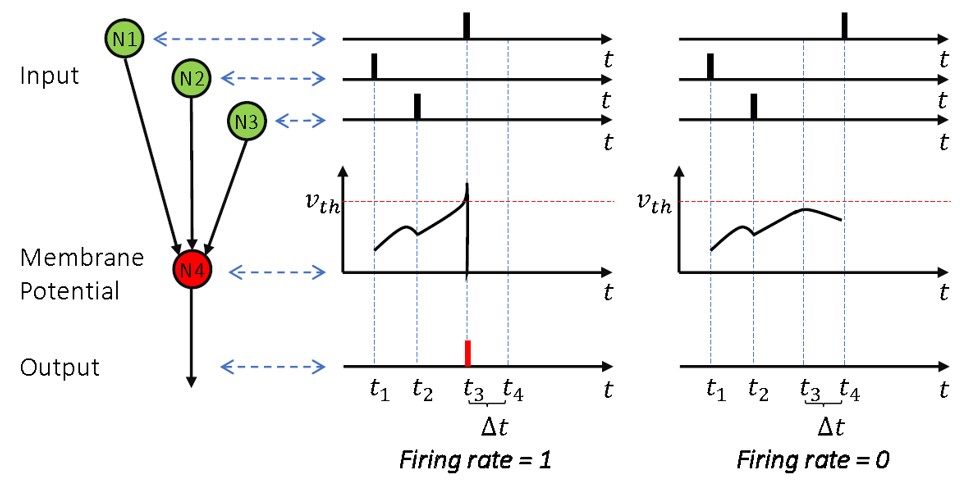
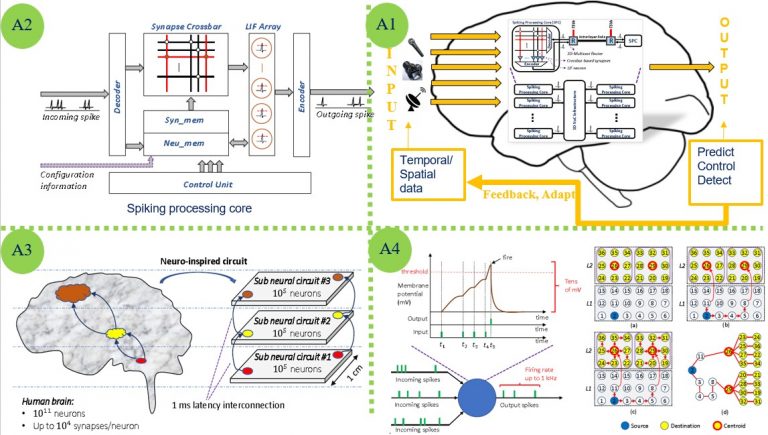
ニューロモーフィック コンピューティングでは、Spiking Neuron Network モデルを使用して、従来の人工ニューラル ネットワークと比較して、より電力/エネルギー効率の高い方法で機械学習の問題を解決します。
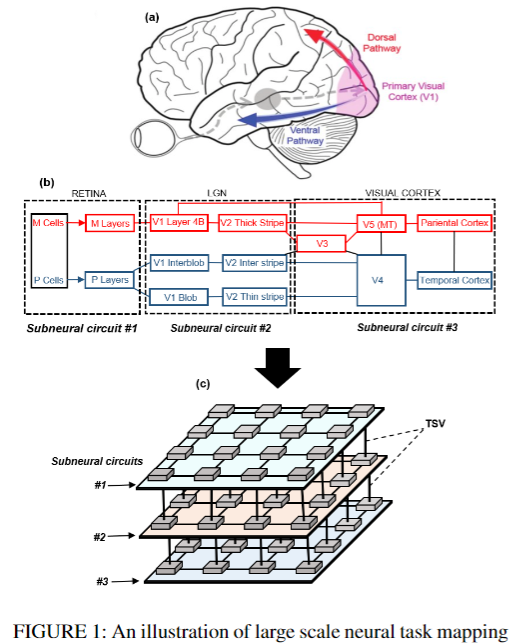
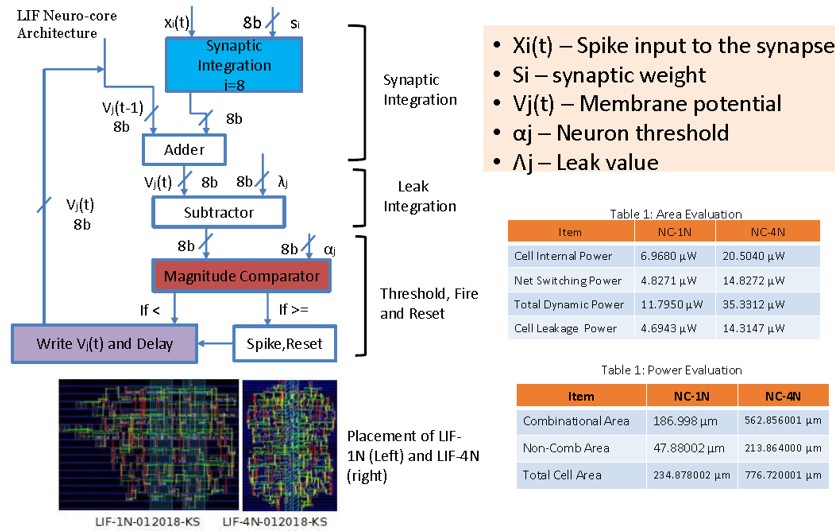
このプロジェクトの目的は、先に開発したフォールト トレラントな 3 次元オンチップ インターコネクト技術を活用した、適応型低電力スパイキング ニューラル ネットワーク システム イン ハードウェア (NASH) の研究開発です。 NASH システムの特徴は次のとおりです。(1) さまざまな SNN パラメーター (スパイクの重み、ルーティング、隠れ層、トポロジなど) の再構成を可能にする効率的な適応構成方法 (2) さまざまなディープ NN トポロジーの混合 ( 3) 効率的なフォールト トレラント マルチキャスト スパイク ルーティング アルゴリズム。(4) 効率的なオンチップ学習メカニズム。
NASH システムの性能を実証するために、FPGA 実装を開発し、VLSI 実装も確立する必要があります。
研究者
-
 ベン アブダラ アブデラゼク
教授、理事(教育・学務担当)、コンピュータ理工学部学 部長、コンピュータ理工学部学 コンピュータ理工学科長
BEN ABDALLAH Abderazek
ベン アブダラ アブデラゼク
教授、理事(教育・学務担当)、コンピュータ理工学部学 部長、コンピュータ理工学部学 コンピュータ理工学科長
BEN ABDALLAH Abderazek
-
ベン アブダラ アブデラゼク
教授、理事(教育・学務担当)、コンピュータ理工学部学 部長、コンピュータ理工学部学 コンピュータ理工学科長
BEN ABDALLAH Abderazek
-
ベン アブダラ アブデラゼク
教授、理事(教育・学務担当)、コンピュータ理工学部学 部長、コンピュータ理工学部学 コンピュータ理工学科長
BEN ABDALLAH Abderazek
-
ベン アブダラ アブデラゼク
教授、理事(教育・学務担当)、コンピュータ理工学部学 部長、コンピュータ理工学部学 コンピュータ理工学科長
BEN ABDALLAH Abderazek
-
ベン アブダラ アブデラゼク
教授、理事(教育・学務担当)、コンピュータ理工学部学 部長、コンピュータ理工学部学 コンピュータ理工学科長
BEN ABDALLAH Abderazek
-
ベン アブダラ アブデラゼク
教授、理事(教育・学務担当)、コンピュータ理工学部学 部長、コンピュータ理工学部学 コンピュータ理工学科長
BEN ABDALLAH Abderazek
-
ベン アブダラ アブデラゼク
教授、理事(教育・学務担当)、コンピュータ理工学部学 部長、コンピュータ理工学部学 コンピュータ理工学科長
BEN ABDALLAH Abderazek
-
ベン アブダラ アブデラゼク
教授、理事(教育・学務担当)、コンピュータ理工学部学 部長、コンピュータ理工学部学 コンピュータ理工学科長
BEN ABDALLAH Abderazek
-
ベン アブダラ アブデラゼク
教授、理事(教育・学務担当)、コンピュータ理工学部学 部長、コンピュータ理工学部学 コンピュータ理工学科長
BEN ABDALLAH Abderazek
-
ベン アブダラ アブデラゼク
教授、理事(教育・学務担当)、コンピュータ理工学部学 部長、コンピュータ理工学部学 コンピュータ理工学科長
BEN ABDALLAH Abderazek
-
ベン アブダラ アブデラゼク
教授、理事(教育・学務担当)、コンピュータ理工学部学 部長、コンピュータ理工学部学 コンピュータ理工学科長
BEN ABDALLAH Abderazek
-
ベン アブダラ アブデラゼク
教授、理事(教育・学務担当)、コンピュータ理工学部学 部長、コンピュータ理工学部学 コンピュータ理工学科長
BEN ABDALLAH Abderazek
-
ベン アブダラ アブデラゼク
教授、理事(教育・学務担当)、コンピュータ理工学部学 部長、コンピュータ理工学部学 コンピュータ理工学科長
BEN ABDALLAH Abderazek
-
ベン アブダラ アブデラゼク
教授、理事(教育・学務担当)、コンピュータ理工学部学 部長、コンピュータ理工学部学 コンピュータ理工学科長
BEN ABDALLAH Abderazek
-
ベン アブダラ アブデラゼク
教授、理事(教育・学務担当)、コンピュータ理工学部学 部長、コンピュータ理工学部学 コンピュータ理工学科長
BEN ABDALLAH Abderazek
-
ベン アブダラ アブデラゼク
教授、理事(教育・学務担当)、コンピュータ理工学部学 部長、コンピュータ理工学部学 コンピュータ理工学科長
BEN ABDALLAH Abderazek